Posted by Unknown at 8:13 AM
Read our previous post
Inverse kinematics
From Wikipedia, the free encyclopedia
transforms the motion plan into joint actuator trajectories for the robot.

An industrial robot performing arc welding.
Inverse kinematics computes the joint trajectories needed for the robot to guide the welding tip along the part

An industrial robot performing arc welding.
Inverse kinematics computes the joint trajectories needed for the robot to guide the welding tip along the part
Inverse kinematics refers to the use of the kinematics equations of a robot to determine the joint parameters that
provide a desired position of the end-
provide a desired position of the end-
effector.[1] Specification of the movement of a robot so that its end-effector achieves a desired task is known as
motion planning. Inverse kinematics
motion planning. Inverse kinematics
The movement of a kinematic chain whether it is a robot or an animated character is modeled by the kinematics
equations of the chain. These equations define the configuration of the chain
in terms of its joint parameters. Forward kinematics uses the joint parameters to compute the configuration of the
chain, and inverse kinematics reverses this calculation to determine the joint
parameters that achieves a desired configuration.[2][3][4]
equations of the chain. These equations define the configuration of the chain
in terms of its joint parameters. Forward kinematics uses the joint parameters to compute the configuration of the
chain, and inverse kinematics reverses this calculation to determine the joint
parameters that achieves a desired configuration.[2][3][4]
For example, inverse kinematics formulas allow calculation of the joint parameters that position a robot arm to
pick up a part. Similar formulas determine the positions of the skeleton of an animated character that is to move in
a particular way.
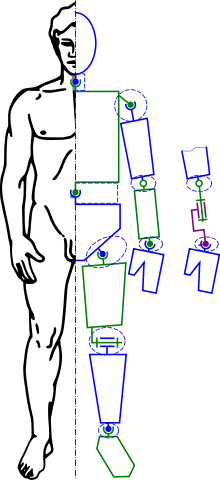
A model of the human skeleton as a kinematic chain allows positioning using inverse kinematics
pick up a part. Similar formulas determine the positions of the skeleton of an animated character that is to move in
a particular way.

A model of the human skeleton as a kinematic chain allows positioning using inverse kinematics
Contents |
[edit]Kinematic analysis
Inverse kinematics is an example of the kinematic analysis of a constrained system of rigid bodies, or kinematic
chain.The kinematics equations of a robot can be used to define the loop equations of a complex articulated system.
These loop equations are non-linear constraints on the configuration parameters of the system. The independent
parameters in these equations are known as the degrees of freedom of the system.
chain.The kinematics equations of a robot can be used to define the loop equations of a complex articulated system.
These loop equations are non-linear constraints on the configuration parameters of the system. The independent
parameters in these equations are known as the degrees of freedom of the system.
The IKFast open-source program can solve for the complete analytical solutions of most common robot
manipulators and implement the solution in C++ code. The generated solvers cover most degenerate cases and
can finish in microseconds on recent computers.
manipulators and implement the solution in C++ code. The generated solvers cover most degenerate cases and
can finish in microseconds on recent computers.
While analytical solutions to the inverse kinematics problem exist for a wide range of kinematic chains,
computer modeling and animation tools often use Newton's method to solve the non-linear kinematics equations.
computer modeling and animation tools often use Newton's method to solve the non-linear kinematics equations.
Other applications of inverse kinematic algorithms include interactive manipulation, animation control and
collision avoidance.
collision avoidance.
[edit]Inverse kinematics and 3D animation
Further information: Robotics and Computer animation
Inverse kinematics is important to game programming and 3D animation, where it is used to connect game
characters physically to the world, such as feet landing firmly on top of terrain.
characters physically to the world, such as feet landing firmly on top of terrain.
An animated figure is modeled with a skeleton of rigid segments connected with joints, called a
kinematic chain. The kinematics equations of the figure define the relationship between the joint angles o
f the figure and its pose or configuration. The forward kinematic animation problem uses the kinematics equations
to determine the pose given the joint angles. The inverse kinematics problem computes the joint angles for a
desired pose of the figure.
kinematic chain. The kinematics equations of the figure define the relationship between the joint angles o
f the figure and its pose or configuration. The forward kinematic animation problem uses the kinematics equations
to determine the pose given the joint angles. The inverse kinematics problem computes the joint angles for a
desired pose of the figure.
It is often easier for computer-based designers, artists and animators to define the spatial configuration of an
assembly or figure by moving parts, or arms and legs, rather than directly manipulate joint angles. Therefore,
inverse kinematics is used in computer-aided design systems to animate assemblies and by computer-based
artists and animators to position figures and characters.
assembly or figure by moving parts, or arms and legs, rather than directly manipulate joint angles. Therefore,
inverse kinematics is used in computer-aided design systems to animate assemblies and by computer-based
artists and animators to position figures and characters.
The assembly is modeled as rigid links connected by joints that are defined as mates, or geometric constraints.
Movement of one element requires the computation of the joint angles for the other elements to maintain the joint
constraints. For example, inverse kinematics allows an artist to move the hand of a 3D human model to a desired
position and orientation and have an algorithm select the proper angles of the wrist, elbow, and shoulder joints.
Successful implementation of computer animation usually also requires that the figure move within reasonable
anthropomorphic limits.
Movement of one element requires the computation of the joint angles for the other elements to maintain the joint
constraints. For example, inverse kinematics allows an artist to move the hand of a 3D human model to a desired
position and orientation and have an algorithm select the proper angles of the wrist, elbow, and shoulder joints.
Successful implementation of computer animation usually also requires that the figure move within reasonable
anthropomorphic limits.
No comments:
Post a Comment